Flexagons: Designing a Tetrahedron Based Responsive Daylight Control System
Jeffrey Sroka
This project was presented at and published in the CAADFutures 2019 Conference Proceedings. Contents on this webpage are extracted from Sroka and Ku (2019).
Sroka, J.* and Ku, K., (2019), A Geometry Exploration of Flexagons: Designing a Tetrahedron Based Responsive Daylight Control System, “Hello, Culture”- Proceeding of the 18th International Conference on Computer Aided Architectural Design Futures (CAADFutures 2019), Lee, J.H., eds., Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea republic of, 26-28 June 2019., 26-June-2019–28-June-2019


This project aimed to expand the area of responsive shading systems through the novel application of a volumetric origami geometry – the flexagon. The original contributions of this project come through the design development and prototyping of the kinetics of an octa-flexagon based geometry. Few researchers or designers have investigated the flexagon pattern in architecture and departing from relevant research, this project identified a novel geometric construct of flexagons that allow kinetic actuation with beneficial performative and aesthetic properties. These include surface qualities of the component tetrahedron geometry for daylighting and view control. The aggregation of multiple units resulted in new understanding of the stacking characteristics and the rotational envelope of flexagon geometries.
This project started with the intent to explore surface deformations using computational tools such as Rhino/Grasshopper as well as physical model studies with a variety of different materials. Initial explorations began with origami and other flexible surface techniques to get a better understanding of the range of motions and the level of deformation the surface would achieve. This helped to understand surface curvatures and how different angles and directions of the folds affect the performance of the surface. At the beginning of the project, one of the goals was to find origami patterns that maximized surface and volume change, to be applicable for an adaptive façade that could respond various environmental changes.
One curiosity and strong possibility for a changing façade was found in the flexagon, an inspiration from Arthur H. Stone’s accidental form he stumbled upon while folding his notebook paper at Princeton University in 1939.
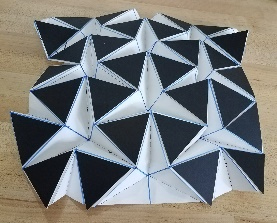
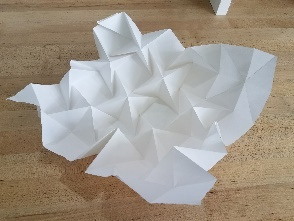
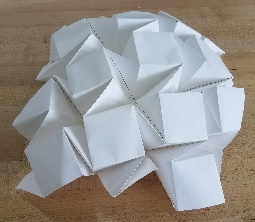
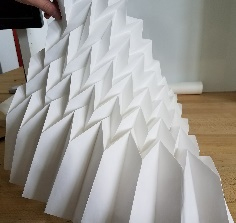
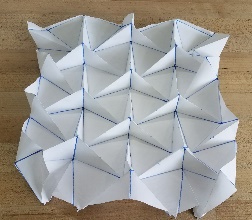
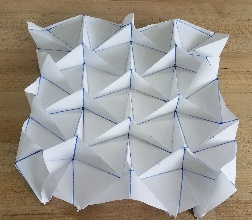
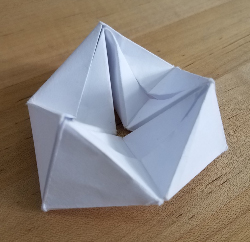
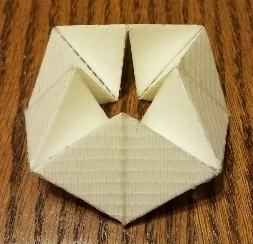
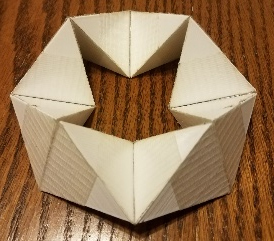
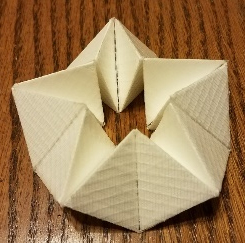
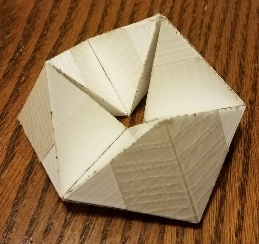
Images below illustrate a few ways that the surfaces can be made up. The photos from the left show a paper folded hexa-flexagon, followed by 3D printed hexa-, octa-, and deca-flexagons. It may find itself to be solid and continuous or it may only have material in specific areas where the structure is needed. The 3D flexagons symmetrically rotate 360 degrees flipping the faces of each component tetrahedron while changing the opening that lies at the center of the flexagon.
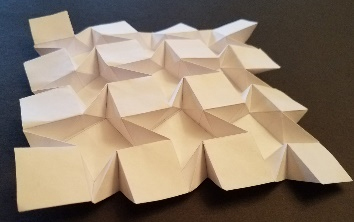
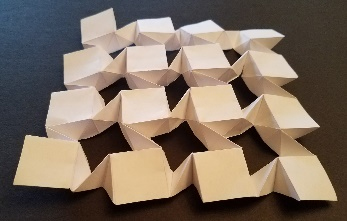
While initially arraying hexa-flexagons modules into larger aggregate surfaces, it was discovered that accommodating rotational mechanisms for staggered hexagonal modules was difficult. As an alternative, an octa-flexagon pattern as an orthogonal array allowed to vertically stack multiple units on single shafts for rotational actuation.


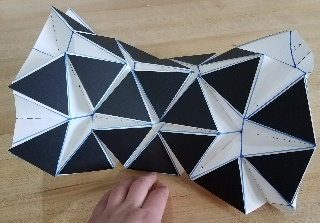
Once it was decided that the custom octagonal geometry supported actuation of modules stacked into column aggregations, investigation of surface materiality and texture of individual surfaces started. By manipulating surface qualities: reflective aluminum, clear glass, and etch patterns. The surfaces created gradients of shading and views, from clear to opaque, based on each surface’s position during the rotation of the tetrahedrons. The photos and diagrams below illustrate how the flexagon rotational position, central void opening, and tetrahedron surface finishes position, influence views and shading conditions.







The final mock-up size of the individual octa-flexagon module was about 1 foot by 1 foot, and an array of 5 (horizontal) x 4 (vertical) units was assembled. 4 flexagon modules are vertically stacked and connected to two outside shafts set into top and bottom bearings of a frame, and actuated by two sets of servo motors. Each flexagon is connected to the shaft via horizontal rods that rotate 180 degrees with the shafts which subsequently flip the flexgons 360 degrees by the rotation of the shafts. The tetrahedron modules surfaces were built from PET-G which had satisfactory transparent qualities while allowing to be laser cut. To emulate the three surface textures and qualities, brushed aluminum sheets were applied for the reflective material, and one of the surfaces were laser scored with a predesigned pattern to create ambient light qualities.
Using an Arduino Microcontroller, the prototype responds to the presence of inhabitants through the use of infrared sensors, and a photocell sensor that responds to changing daylight levels.